|
|
|
高精度实时三维定位! |
|
微创手术“精准导航”有新策略 |
|
|
在血管介入手术、消化道内镜手术、辅助手术机器人等微创手术中,对医疗器械进行实时、精准的三维“导航”,是保障手术安全与操作效率的重要基础。CT、MRI和数字减影血管造影(DSA)等影像技术虽能提供一定的“导航”信息,但设备体量大、依赖特定的手术环境且大多只能提供二维信息,还存在辐射暴露风险。
近年来,磁场定位技术被逐渐引入医疗领域,展现出了巨大的应用潜力,可实时追踪手术器械的位置,为医生提供精准的操作指引,助力提升手术精准性和成功率。传统的磁定位系统依赖固定、刚性的外部传感器或大型电磁装置,缺乏部署灵活性并受空间限制,难以适应复杂多变的临床操作环境。
2月4日,中国科学院深圳先进技术研究院(简称“深圳先进院”)集成所研究员徐天添团队联合浙江大学研究员陆豪健团队在《自然—传感器》上发表最新研究。合作团队开发出了一种可贴附、可定制的柔性磁定位贴片系统,并构建了“双阶段磁定位”策略,有望为微创手术中医疗器械的操作提供高精度、实时跟踪的新策略。
该研究中,徐天添研究员和陆豪健研究员为共同通讯作者;浙江大学控制学院博士生向平宇、硕士生孙丹颖,深圳先进院博士生马国耀为共同第一作者。
研究团队首先构建了一种可贴附、可定制的柔性磁定位贴片,这种贴片基于柔性印刷电路板构建,整体结构轻薄、柔软,可根据具体需求,设计成不同形状与尺寸,能贴附于皮肤表面,或集成于探头、内镜等医疗器械表面,能够“即贴即用”,如同装上“柔性GPS”,为操作医疗器械提供精准指引。
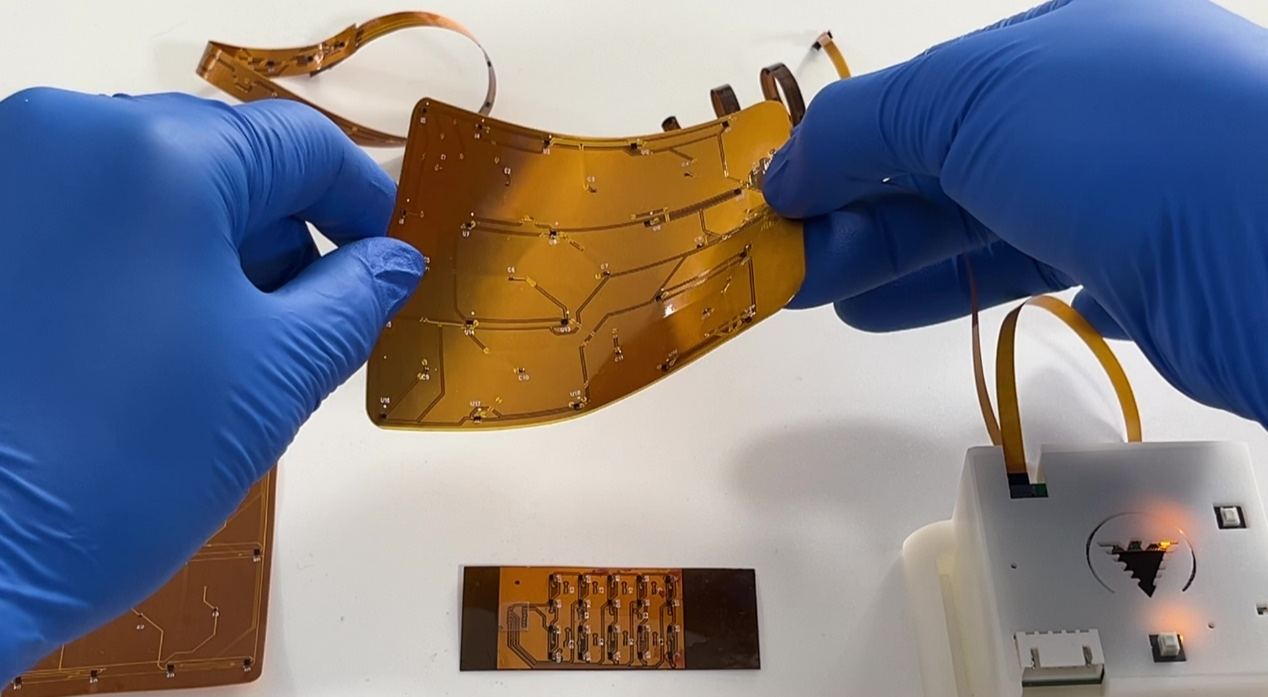
可贴附、可定制的柔性磁定位贴片。研究团队供图
基于这种柔性贴片,研究人员进一步开发出了双阶段定位算法,它就像卫星导航系统中的“基站辅助定位”功能,首先通过外部磁场,确定柔性贴片在全局坐标系中的位置,再以该贴片作为局部参考,实现对体内小型磁性目标的定位。
“在手术部位多样、医疗器械介入路径复杂的临床环境中,传统依赖固定位置的刚性传感器阵列的磁定位技术常常面临‘定位精度’和‘工作空间’难以兼得的困境。”徐天添介绍,团队提出的磁定位策略以柔性磁传感贴片作为中间单元,对传统磁定位的部署方式进行了拓展,有效提升了对复杂临床场景的适应能力。
研究团队进一步对该方法开展了系统性验证。在脑动脉血管介入和ERCP导丝置入模拟实验中,团队提出的磁定位方法展现出针对特定部位的高精度定位能力。
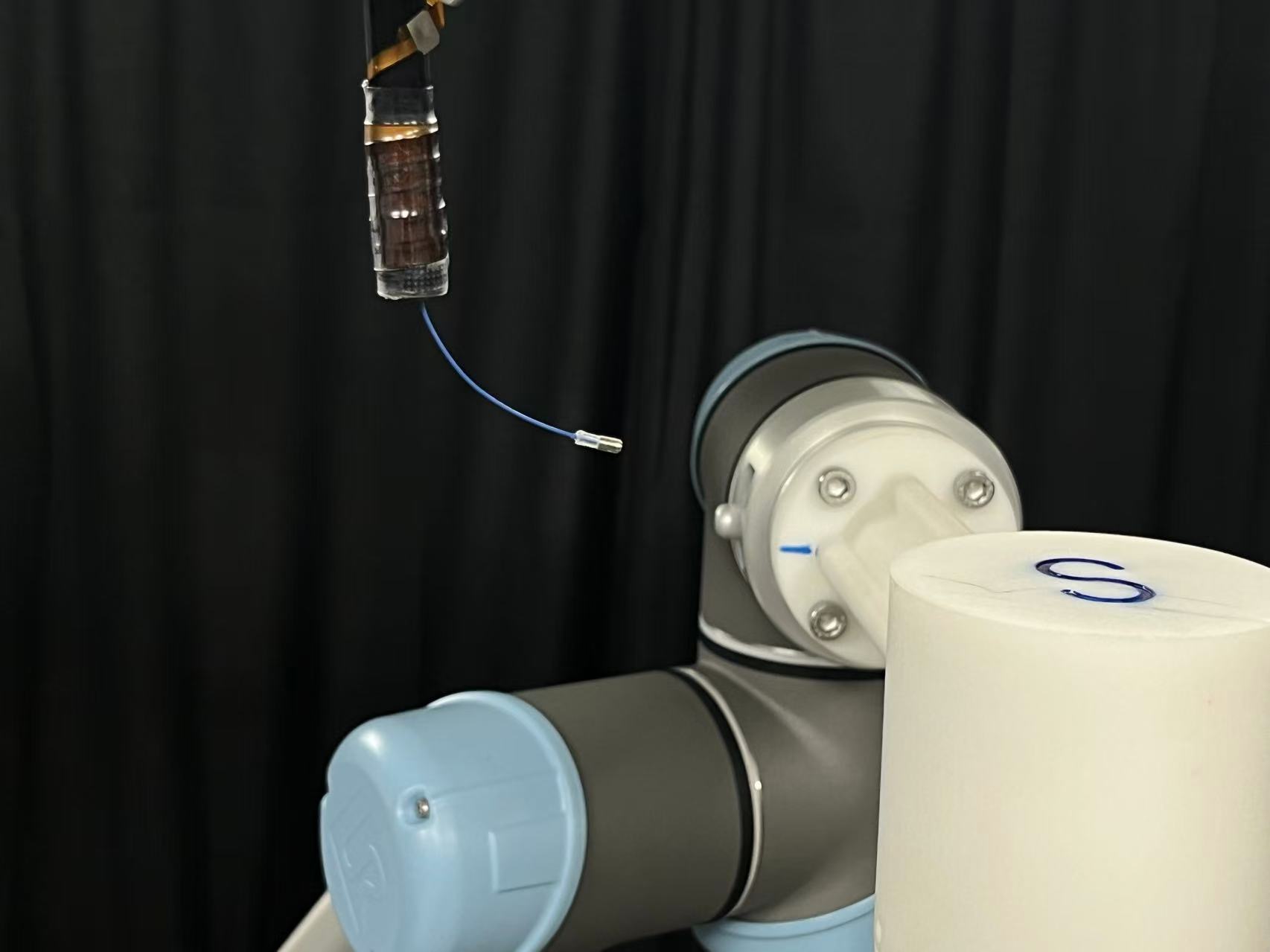
集成了柔性磁定位贴片的ERCP镜用于磁性导丝定位实验 研究团队供图
此外,在巴马猪体内模拟介入实验中,成功实现对猪股动脉内导丝的连续跟踪。在新西兰兔模型中,通过佩戴集成柔性磁传感贴片的腰带,实现了对其胃肠蠕动信号参数的连续采集与分析。这些研究结果表明,这一磁定位策略在手术介入导航、体外生理监测等不同应用中具有良好的稳定性和通用性,在多样化临床场景中具有广泛的应用潜力。
徐天添表示,该研究为磁定位系统提供了一条更加灵活、贴近临床的实施路径。“我们希望证明,磁定位不仅可以在受控环境下‘测得准’,更能在真实体内环境中‘用得上’。”未来,团队将以“双阶段磁定位策略“为核心,进一步探索该方法在多个器械协同导航、长时程生理信号感知等方面的应用,并推动该技术与现有介入医疗器械及临床流程的深度融合,加速其在实际医疗场景中的落地应用。
相关论文信息:https://doi.org/10.1038/s44460-025-00017-9
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。






