近日,西北工业大学航空学院教授宋笔锋团队仿生飞行器课题组设计并研制了小隼2.0仿生扑翼机器人,首次实现姿态可控的仿鸟起飞运动,完美复刻鸟类起飞状态。最新研究成果在《科学进展》上发表。
鸟类与蝙蝠等飞行脊椎动物普遍采用一种特殊的扑翼动作来实现低速飞行。它们的翅膀通过向腹侧和前侧挥舞的下扑过程以及几乎不产生气动力的收折上扑过程来实现这种扑翼动作模式。当飞行脊椎动物从起飞、降落或准悬停的低速飞行状态向巡航平飞的高速飞行状态转变时,翅膀的扫掠运动幅度逐渐减小,翼尖运动轨迹的向后倾斜程度也随之减小,这使得转换过程中飞行脊椎动物的扑动模式是连续变化的。
团队把低速飞行状态下包含了翅膀扑动运动(Flapping)、扫掠运动(Sweeping)、折叠运动(Folding)的这种扑动模式定义为FSF扑动模式,这种翅膀扑动模式在仿生扑翼机器人领域鲜少被探讨和应用。
为此,团队设计并研制了小隼2.0(RoboFalcon2.0)的仿生扑翼机器人,其通过全新的可重构扑动机构能够完美实现扫掠幅度与折叠幅度可调的FSF扑动模式,从而首次实现姿态可控的仿鸟起飞运动。小隼2.0的FSF扑动模式基于圆锥摇臂机构,能够将扑动翼的扑动、扫掠、折叠运动耦合,从而维持相同扑动周期下各自由度不同的扑动相位;通过耦合精细设计的结构柔性扭转变形和展向弯曲变形,进而首次实现了对鸟类“扑动-扭转-扫掠-展缩-弯折”5种复合运动的完美复刻;并能通过两种解耦机构实现在运行过程中对扫掠幅度和折叠幅度的重构调节,更准确地模拟了飞行脊椎动物低速飞行时的扑翼运动学过程。
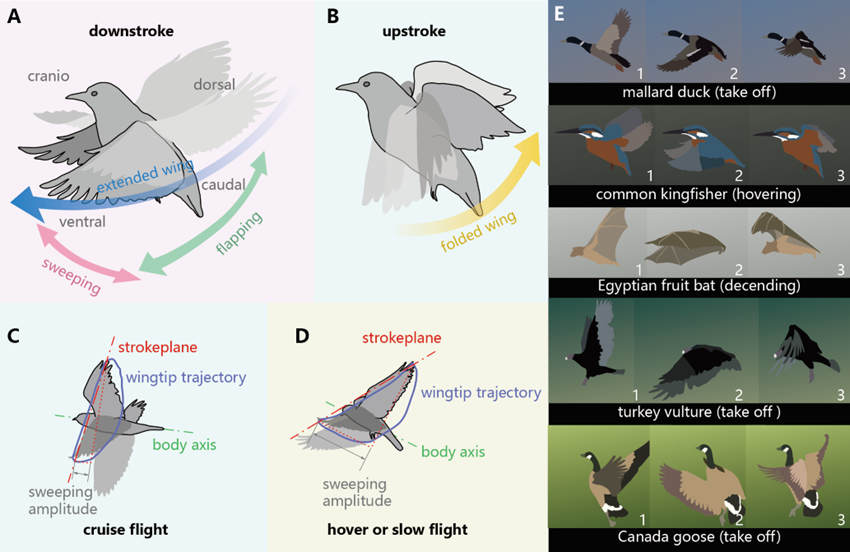 飞行脊椎动物的FSF扑动模式。西北工业大学供图
飞行脊椎动物的FSF扑动模式。西北工业大学供图
?
团队通过可以实现仿鸟复杂运动和气动力、柔性变形同时可测的风洞实验平台,进一步发现了扑动翼扫掠幅度对FSF扑动模式产生的升力及俯仰力矩的影响机理;通过高精度计算流体力学仿真手段揭示了FSF扑动模式的气动特性与前缘涡强度及压力中心的前后位置变化强耦合的空气动力学机理;通过动力学仿真研究了基于扫掠幅度调节的俯仰控制策略对起飞阶段俯仰姿态控制效果,并最终通过实机飞行测试验证了小隼2.0的仿鸟自主起飞能力与姿态控制能力。
这项成果不仅能为鸟类飞行机理的研究带来新的视角与方法,并推动仿生程度更高、飞行包线更广的仿生扑翼机器人研究的发展。
相关论文信息:https://doi.org/10.1126/sciadv.adx0465
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。






