|
|
|
|
|
“章鱼手套”来了!他们用3D打印+水凝胶打造新一代“温柔抓手” |
|
|
“轻一点,再轻一点!”实验室里,一只机械臂缓缓伸向盛在碗里的生蛋黄。围观的几位科研人员屏住呼吸——蛋黄表面那层薄膜薄到几乎透明,任何轻微挤压都可能前功尽弃。然而,机械臂前端的“吸盘”只是温柔地贴住蛋黄,稳稳提起,再平稳放回。蛋黄完好如初,甚至没留下指纹。
近日,中国科学院兰州化学物理研究所润滑材料全国重点实验室3D打印摩擦器件组,通过重构章鱼吸盘的“材料-结构-功能”三重密码,成功开发出全球首款自适应水凝胶仿生吸盘。该成果不仅实现了对粗糙表面的无损粘附,更让水下机器人首次具备了“温柔抓取”超软物体的能力,相关论文发表于《纳米微米快报》(Nano-Micro Letters)。
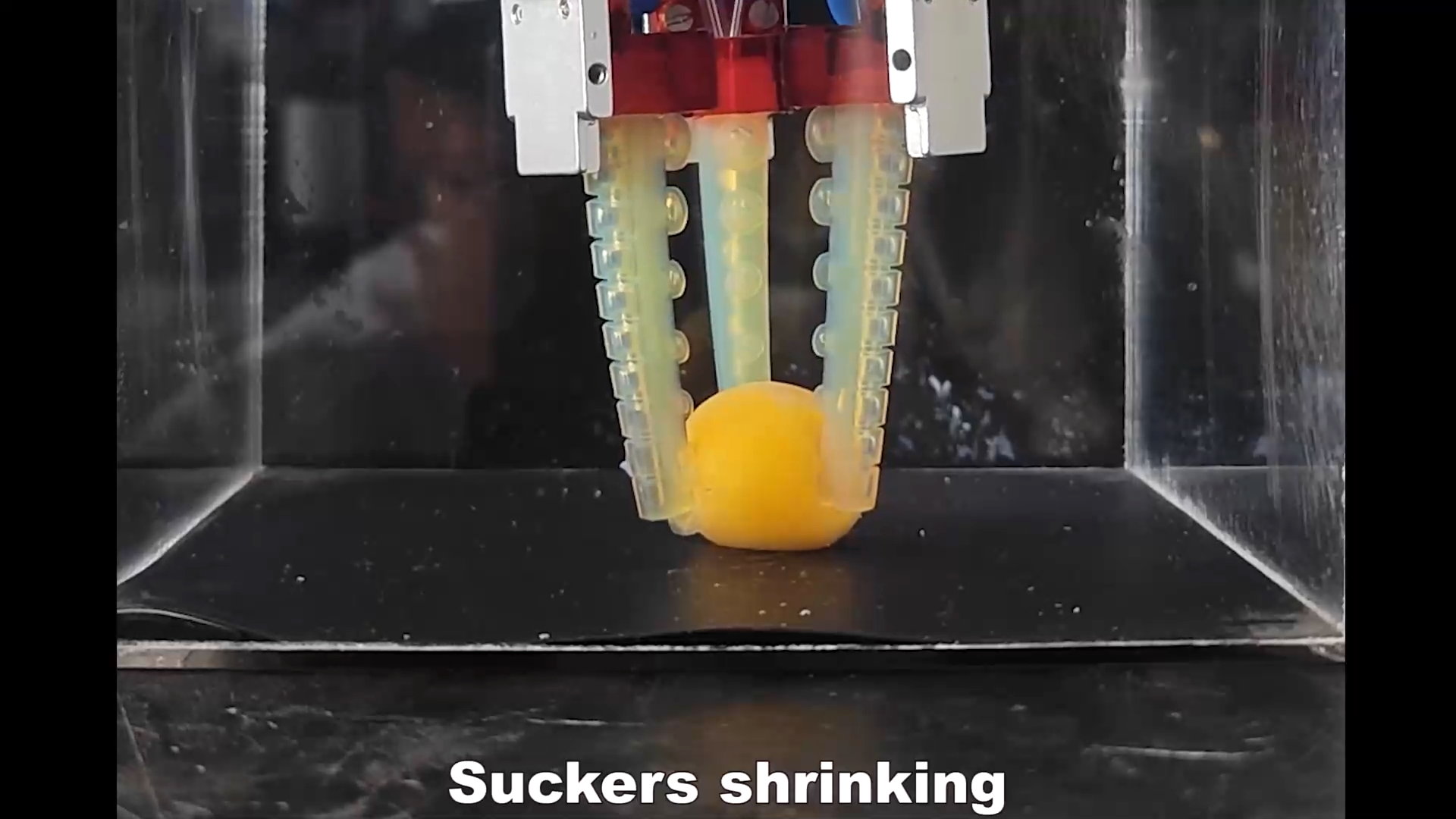 自适应水凝胶仿生吸盘在抓取蛋黄。兰州化学物理研究所供图。
自适应水凝胶仿生吸盘在抓取蛋黄。兰州化学物理研究所供图。
?
自然界的启示:章鱼吸盘的奥秘
提起吸盘,人们首先想到的大概是浴室挂钩或工厂里的真空抓手。它们确实“一吸就牢”,但面对潮湿、粗糙或易碎物体时却常常失灵:玻璃没问题,磨砂玻璃就漏气;金属没问题,沾水的贝壳就滑脱;更要命的是,为了“密封”往往要用大力,水果被捏出坑、光学镜片被划出痕。
“这些痛点,章鱼早在几千万年前就解决了。”中国科学院兰州化学物理研究所润滑材料全国重点实验室研究员王晓龙说。章鱼每条腕足上分布着数百个吸盘,吸盘边缘的柔软、肌肉发达的唇口可以像垫圈一样,在肌肉控制下主动变形,贴合微观不平整的表面,形成瞬时水密封,能在粗糙、湿润甚至多孔的表面上实现强吸附。整个吸盘由柔软的组织构成,其接触面是顺应性的。实现了对螃蟹、贝壳等物体的“无损伤”和“自适应”抓取。
“如果我们能复制这一套‘智能粘附’系统,就能让机器人拥有‘温柔而有力的手’。”王晓龙说。然而,说起来容易做起来难。传统模压、浇铸只能做出“一张皮”,章鱼的微褶皱、微通道、可变曲率膜等复杂层级结构无法原样照搬;再加上深海高压、高盐、低温的极端环境,普通橡胶和塑料不是变硬就是开裂,仿生之路一度受阻。
“复制这套系统,必须同时突破材料和结构两大瓶颈。”王晓龙说。
 自适应水凝胶仿生吸盘。兰州化学物理研究所供图。
自适应水凝胶仿生吸盘。兰州化学物理研究所供图。
?
解构自然:材料与结构的创新融合
要复制章鱼吸盘的功能,研究团队面临两大难题。材料方面,传统水凝胶要么太软易破,要么太硬不够柔韧,难以同时做到“柔软”又“坚韧”;制造上,章鱼吸盘内部精细的褶皱和微通道结构,用传统模压、浇铸方法根本做不出来,导致仿生吸盘难以达到天然吸盘的适应性和耦合能力。
所以,团队最大的挑战就是如何精准复刻出章鱼吸盘那复杂又实用的功能。
助理研究员刘德胜说:“团队首先从材料出发,天然章鱼吸盘的核心能力是‘无损伤吸附、复杂表面适应、动态调控’,而水凝胶的力学可控性、动态形变能力、环境响应性恰好对应这三大需求,成为连接“自然仿生”与“工程应用”的关键桥梁。”
在之前的研究基础上,团队已经制备过多种强韧性的水凝胶材料,但是对于仿生吸盘这种特殊设备,材料的强度过高反而不好。因此,制备适合于仿生驱动器件的柔韧性水凝胶材料成为了我们迫切的需求。
为此,团队重新设计了一种“超分子水凝胶”——看起来是一块果冻,却兼具高韧性和可编程刚度。秘诀在于强弱氢键协同:弱键保证柔软、可拉伸;强键在外力过大时“锁死”,防止撕裂。通过微相分离技术,二者在微米尺度均匀分布,实现了“既柔且韧”。
刘德胜说:“有了合适的材料,接下来就是结构制造。为了实现之前所述的功能,团队设计了带有曲率膜的吸盘结构和多通道的仿章鱼触手结构,这种结构能够有效的实现温柔的接触和无损的释放功能。”
但是,这种复杂结构的构筑很难通过传统的制造工艺实现。因此,团队选择光固化3D打印技术,利用其“逐层叠加”的原理,完全摆脱结构复杂性对制造的束缚,精准设计并制造出具有不同曲率膜的仿章鱼吸盘。通过结构优化,吸盘实现了对不同表面的可靠贴合与温和的自适应粘/脱附,突破了传统仿生吸盘“吸附稳定性差、脱附难度高”的技术痛点,为柔性仿生吸附器件的高效制备提供了关键技术支撑。
“这些挑战本质上是‘自然智慧’”与‘工程技术’的差距体现,每一步突破都需要材料、机械、生物等多学科的协同。目前我们虽在部分技术上取得进展,但距离完全复刻天然章鱼吸盘的“自适应-自感知-自修复”能力仍有差距。”王晓龙解释,未来还需在仿生控制算法、智能材料研发等方面持续探索,让仿生吸盘真正实现从“模仿自然”到“超越自然”的跨越。
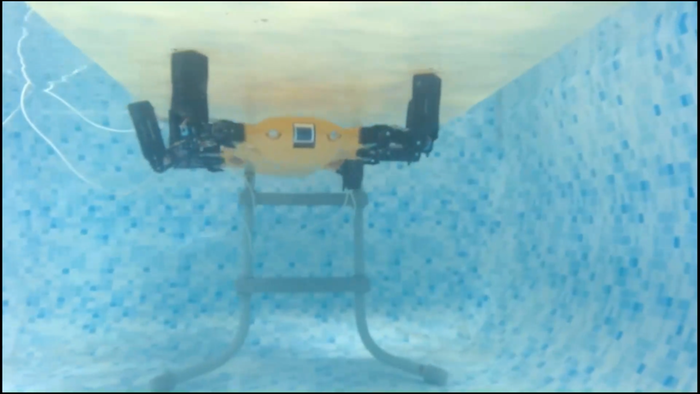 3D打印水凝胶吸盘结构在水下场景中的应用展示。兰州化学物理研究所供图。
3D打印水凝胶吸盘结构在水下场景中的应用展示。兰州化学物理研究所供图。
应用前景广阔:多级仿生,开启无限可能
据悉,目前团队研究的水凝胶抓取器能够装配在机械手上,通过机械手程序控制和驱动泵系统的控制可精准完成各类形状物体的抓取与释放,尤其针对豆腐、蛋黄等超软易损物体,能始终保持无损操作。
这种“水凝胶软抓取器-机械臂”集成系统,为水下环境中物体的精准转运、柔性操控提供了创新技术方案,在水下作业、生物医疗(如水下软组织转运)等领域展现出广阔应用潜力。
“我们通过对章鱼吸盘可形变肌壁和腔内压力精确调节原理的研究,就能设计出适应不同表面的含吸盘的自适应抓手。”刘德胜表示,未来,通过装配这种吸盘有望应用于深海探测机器人,助力其在复杂海底环境进行作业,也能用于柔性生产线机械臂,提高工业自动化水平,推动机器人在极端环境和复杂任务中的应用升级。
其次,在生物工程方面,面对医疗领域对非侵入性、精准且低损伤的技术需求迫切。仿生章鱼吸盘的可逆粘附与生物相容性研究正不断深入。通过章鱼吸盘柔性贴合机制,有望拓展其在伤后愈合、器官修复等场景的应用。
最后,在柔性电子领域,将柔性传感器嵌入仿生吸盘当中,能够实现吸附力的实时调控,有望实现“感知-驱动-粘附”一体化的创新。为可穿戴设备、生物电子接口提供了新方案,未来有望广泛应用于工业搬运、智能制造、医疗辅助等领域。
“目前,对于深海和深空的高压、低温、高盐等特殊环境,我们还很难在实验室模拟其真实工况,我们材料和功能都有很大的局限性。”王晓龙也坦言道,对于实际的工作场景,还在进一步进行相关的工作,希望从实验室走向湖泊、深海等实际应用场景,能够在这些领域有更加深入的应用,从实验室走向实际应用一致是团队的追求和目标。
相关论文信息:https://doi.org/10.1007/s40820-025-01880-4
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。






