近日,中国科学院深圳先进技术研究院集成所智能仿生中心团队在水下可穿戴外骨骼领域取得重要进展。团队成功研发了一款柔性潜水助力外骨骼系统——PEAKED,它能够协助潜水员完成多种水下动作,包括交替打腿、蛙泳腿以及水下行走,同时大幅降低水下耗氧速率,为水下作业效率与安全性带来提升。相关研究成果发表于发表在《IEEE 机器人汇刊》。
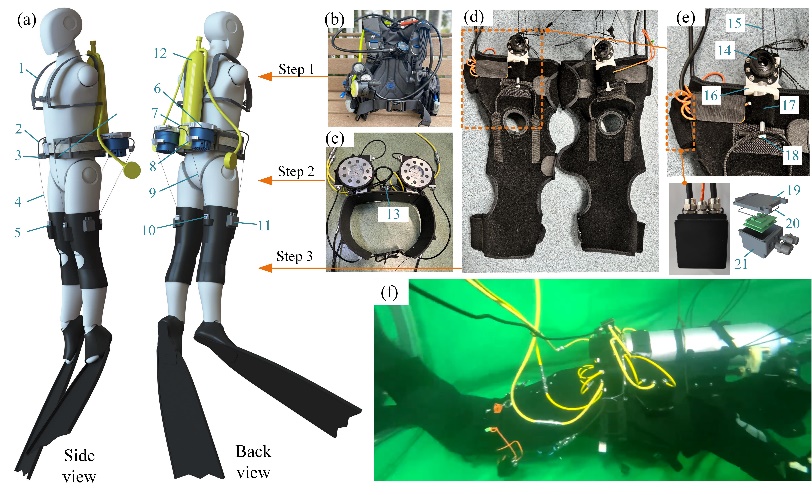 PEAKED柔性潜水助力外骨骼系统 研究团队供图
PEAKED柔性潜水助力外骨骼系统 研究团队供图
?
在海洋作业中,石油平台维护、管道安装与检查、水下救援和船体清洁等任务,通常需要潜水员在水下长时间工作。长时间的潜水活动会导致潜水员的代谢成本大幅增加,从而增加减压病等潜水相关疾病的风险。对此,研究团队依据潜水员在水下的多模态动作特征,研制了双向套索传动髋关节驱动器,可同时提供双腿屈曲和伸展方向助力,同时能够保证在非助力模式下大腿自由动作不受约束,实现任务的高效性和人员安全性。这一设计不仅提高了潜水员的自主移动能力,还显著降低了他们在水下作业时的体力消耗。
此外,水下运动因水流扰动,外骨骼易在电缆松弛时进入“不可控状态”,导致助力突兀或延迟。团队提出级联力积分控制算法CFI,通过预测潜水员运动相位,实时生成目标力积分曲线,并结合自适应参数估计补偿扰动。实验显示,相较于传统方法,CFI控制器助力波动显著降低,响应延迟低于5%动作周期,可实现平滑、稳定的助力输出,显著增强了其在复杂环境中的适应能力。
研究团队对9名参与者在不同的运动模式和频率下进行了测试,结果显示,PEAKED针对水下交替打腿能减少潜水员气瓶内空气消耗速率29.77%±7.68%,针对蛙泳打腿降幅为25.70%± 5.99%,而在水下行走时降幅为18.35% ± 4.53%。这些数据表明,PEAKED在减少潜水员代谢成本方面具有显著效果。在高频率动作方面,PEAKED助力效能更为明显, 在动作频率达0.7赫兹时,个体的普遍耗氧降幅超过40%,意味着在20米以内水深的续航时间可以从45分钟增加到1小时左右。
该成果推动了水下可穿戴机器人技术的发展,为人类探索海洋、开发海洋提供了重要工具。随着这一技术的成熟和完善,潜水员们有望能够借助潜水外骨骼系统,安全、高效地完成水下任务。
相关论文信息:https://ieeexplore.ieee.org/document/10891852
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。






