不用看、只用摸,仅凭“手感”,就能判断一颗番茄的成熟度。现在,机械手正在习得这种人类经验。它所依赖的,是一款特制的“电子皮肤”。近日,中国科学院自动化研究所(以下简称自动化所)研究员程龙团队研发了一款“触觉—接近觉”双模光电传感器,并提出一套通用的“接近—触觉伺服控制框架”,为下一代机器人提供了这种“皮肤感知”能力。
近日,相关工作以“一种触觉—接近双模光电传感器的实现及应用”(A Tactile-Proximity Dual-Mode Photoelectric Sensor: Implementation and Applications)为题,在线发表于IEEE TRANSACTIONS ON ROBOTICS期刊。
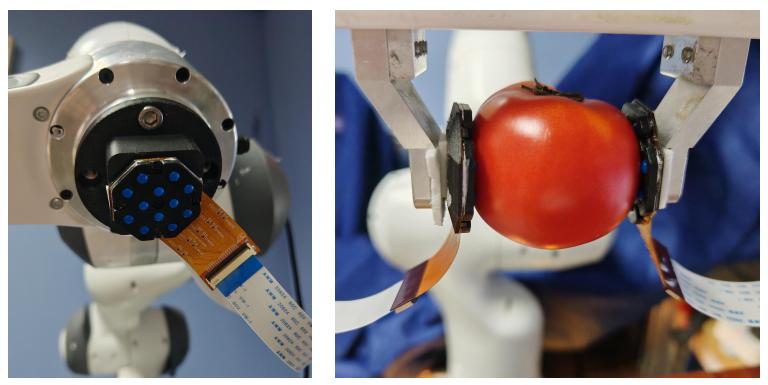
触觉-接近觉双模光电传感器展示。自动化所 供图
在人机交互和智能操作任务中,触觉与接近觉(非接触式感知)至关重要。机器人不仅需要“能看”,更需要“可摸”和“可感”。然而,目前大部分机器人传感器只能实现“碰到才知”(纯触觉),或者只能“远远看着”(纯接近觉)。有些双模传感器虽然试图兼顾两者,却常常面临体积庞大、易受环境干扰、不同感知模式互相串扰等问题。更进一步地,很多设计无法在同一个器件内独立、稳定地运行两种感知模式,导致机器人在复杂任务中“手忙脚乱”。
为解决这些难题,自动化所团队另辟蹊径,全部采用光电原理研发了该款触觉—接近觉双模光电传感器,通过两种不同结构实现双模感知。其中,触觉靠“可变光路”,即外力使柔性盖板下压,遮挡红外光路,光强变化转化为压力信号;接近觉靠“表面反光”,发射红外光并接收物体反射光,通过光强判断距离和表面属性(如颜色、光滑度)。两种感知模式互不干扰,可以同时有序运行。
并且,这款光电传感器灵敏度高(最高达1.12 V/N),稳定性好(8000次按压漂移小于1%),结构轻薄(厚度仅4 mm),可轻松安装在机械臂末端或夹爪上。
为了让机器人用好该传感器,研究团队还基于多种触觉特征与接近特征,首次提出“接近—触觉伺服控制框架”,让机器人能灵活切换纯触觉、纯接近觉、双觉混合三种模式。
有了这款传感器以及伺服控制框架,团队开展了机器人仅凭“手感”对番茄成熟度判断的实验。实验中,研究人员将两个双模传感器分别嵌入Franka机械臂夹爪的两侧。当机械臂缓缓闭合抓取番茄时,整个过程被划分为两个阶段。
一是接近阶段(非接触),在夹爪尚未触碰到番茄时,传感器通过红外光的表面反射强度,实时感知果皮的颜色深浅、光滑度与曲率。反射信号越强,表示番茄表皮更红、更亮,反射信号弱,则表示番茄偏绿或偏硬。此外,它还能根据中心与边缘传感器的反射差异,判断果形的圆润度。
第二阶段为接触阶段(轻触抓取)。当夹爪与番茄接触时,柔性盖板受压变形,触觉单元立即记录压力分布图。熟透的番茄质地柔软,受压后接触面积大、压力分散均匀;而生番茄则坚硬紧实,压力集中在少数几个点上,分布更集中、峰值更高。
基于两阶段采集的时序多模态数据,团队设计了一个名为TPNet的深度学习模型,输出四类成熟度判断:未熟、半熟、成熟、过熟。实验结果显示,该模型的成功率达到94.4%。此外,系统还能捕捉番茄两侧成熟度不一致的罕见情况(即“阴阳果”),进一步提升了判断的鲁棒性。
相关论文信息:
DOI: 10.1109/TRO.2025.362978
https://ieeexplore.ieee.org/document/11230867
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。






