近日,暨南大学化学与材料学院副教授王吉壮、教授李丹团队与合作者,在前期光驱动硅纳米线马达研究的基础上,进一步开发了基于金属-绝缘体-半导体(MIS)结构的光磁复合硅基微马达,通过能带结构优化将磁性金属Ni引入MIS结构的一体化构造,在保证优异光电化学性能的基础上,增强了方向的操控性。此外,磁性元素的引入也为合理化磁组装提供了条件。相关成果发表于《德国应用化学》(Angew. Chem. Int. Ed.)。
“该工作所提出的马达作为基础组件合理化组装以及模板辅助的组装方法对功能微机器人构建及应用发展具有一定的借鉴意义。”论文通讯作者王吉壮表示,以光驱动硅基马达作为基础组件,其团队创新性的开发了微洞阵列模板辅助的磁组装策略实现了多种结构的硅基微机器人的合理化组装构建,并展示出增强的细胞操控性能。
微纳机器人作为一种微观尺度上具有特定功能的新型微纳米器件,其研究及应用取得了显著进展。然而,随着应用研究的深入,对其操控性和功能性提出了更高的要求,这也激发了领域研究者不断尝试新的方法,以满足应用需求构建功能微纳机器人。其中,通过整合不同的功能组件并开发合理的组装策略被证明是一种有效的方法来构建微纳机器人。
该研究提出了MIS结构的硅纳米线光磁复合微马达,通过MIS结构的优化设计,合理化选择磁性金属Ni作为金属端,同时也可作为磁控组分,为硅纳米线光磁复合微马达的精确磁操控和组装提供了可能。在可见光的照射下,硅纳米线光磁复合微马达利用光激发的光电化学反应诱导的自电泳进行有效推进和实时的启停控制。
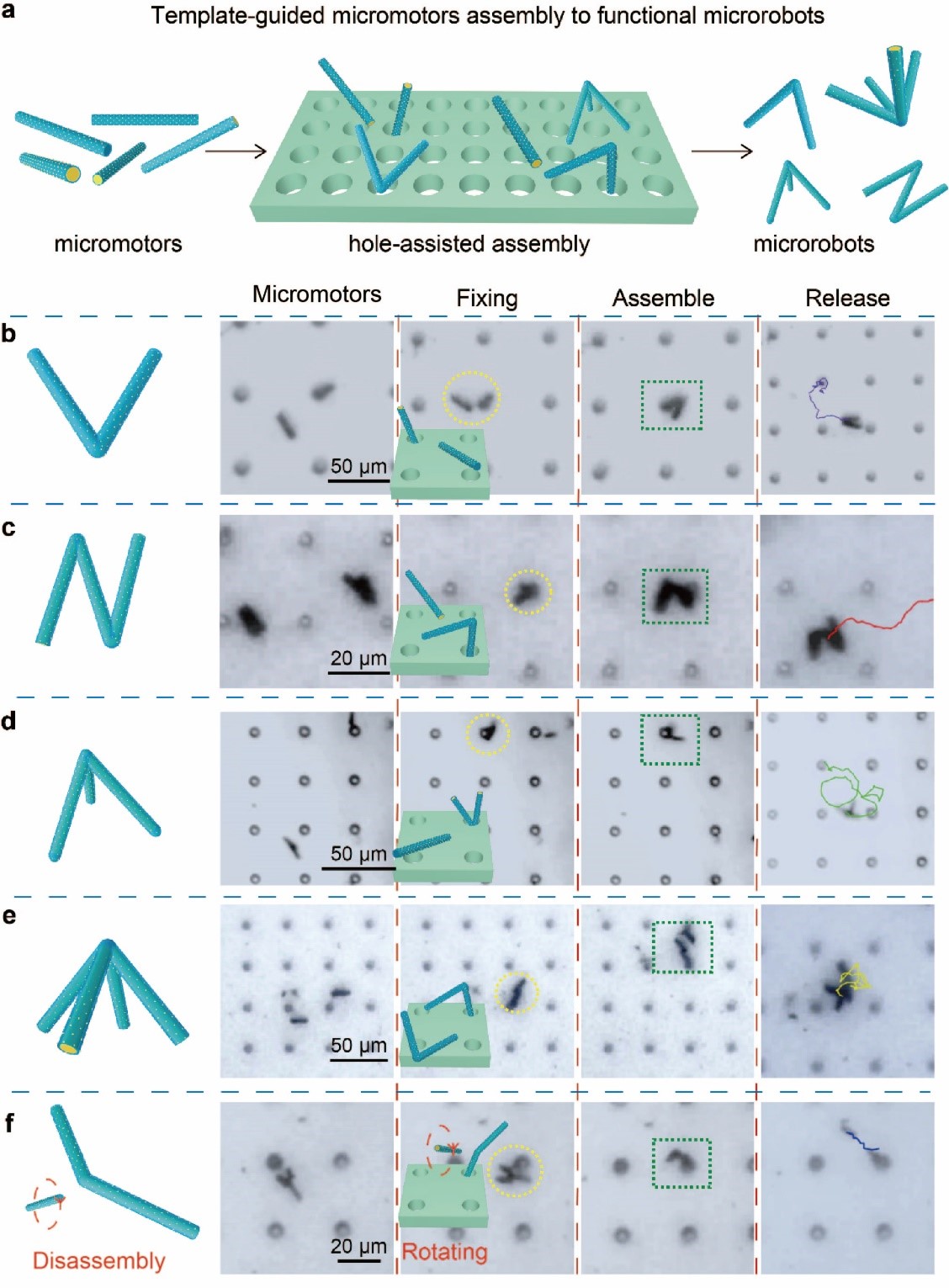
研究人员利用所开发的MIS结复合马达的磁性特征,创新性的提出了一种微洞阵列模板辅助组装的方法。他们首先将一个马达引导进入洞中固定,然后操控另一个马达与其组装,重复该过程即可实现不同结构微机器人的构建。除了组装,通过微洞还可实现解组装的操作。孔辅助组装为微纳机器人的构建提供了一种简单可行的策略。
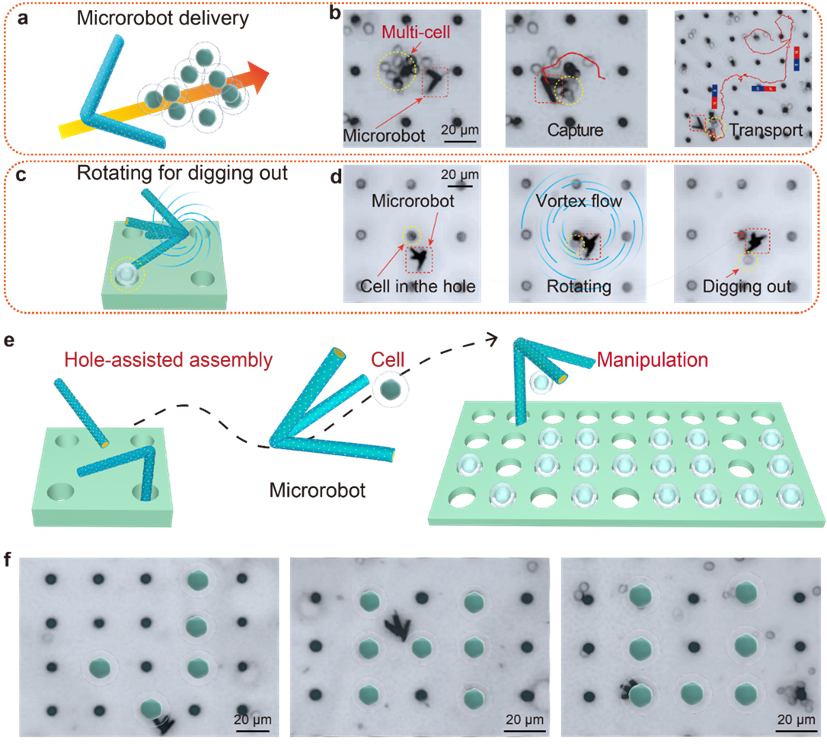
与单个微纳马达相比,组装的微机器人表现出增强的操控能力。“V”字型微机器人具有运输多个细胞的能力。此外,还可通过磁控的旋转实现细胞的挖掘操作。空间的三叉结构马达表现出更稳定的细胞抓取能力,利用三叉微机器人可以实现细胞的精确操控,构建独特的JNU形状。
论文通讯作者王吉壮表示,在可见光激发下,通过光电化学反应触发的自电泳实现自驱动。利用该微马达的磁性特征,通过简单的洞阵列模板辅助实现了微马达组装以构建多种结构的微机器人。这些组装的微机器人展示了增强的细胞操控能力,包括多细胞运输、深洞挖掘和精准定位。
相关论文信息:https://doi.org/10.1002/anie.202405895
?
基于MIS结硅纳米线光磁复合马达的构建、模板辅助合理化组装微机器人及细胞操控示意图。研究团队供图
?
基于微洞阵列模板辅助组装的方法实现微机器人的合理化组装与拆解。研究团队供图
?
微型机器人对细胞的操控。研究团队供图
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。