生命科学
|
医学科学
|
化学科学
|
工程材料
|
信息科学
|
地球科学
|
数理科学
|
管理综合
站内规定
|
手机版
首页
|
新闻
|
博客
|
院士
|
人才
|
会议
|
基金·项目
|
论文
|
绘图
|
视频·直播
|
小柯机器人
|
医学科普
头 条
更多>>
直播回放丨高校专业大洗牌!报考策略如何调整
今晚19点特邀东南大学教务处处长陆金钰、南开大学信息与传播学院副院长樊振佳和西南科技大学招生就业处副处长胡小俊,畅聊高考专业如何报考。
孙燕辉:老船长的深海征途
58岁的孙燕辉,是中国科学院深海科学与工程研究所的高级船长。从驾驭万吨巨轮远航,到驾驶“探索”系列科考船挺进深蓝,他半生与大海相连。近日,孙燕辉获得全国五一劳动奖章。
要 闻
更多>>
·
RNA修饰m6A调控绣球菌菌丝生长的表观调控机制
·
直播预告丨交叉学科遍地开花,选专业如何不踩雷?
·
直播预告丨脑机接口、储能……风口专业要不要冲?
·
湖北省科技期刊楚天卓越行动计划入选项目公布
·
湖北省青年科技人才晨光托举工程评审结果公示
·
山东大学校长:不求一蹴而就之功 常守滴水穿石之...
·
李斌任南京大学副校长
·
最“活人感”的校长:拒绝成为自己讨厌的那种人
·
刚领完国际气象组织奖,他就把奖金全捐了
未来数十年南极变化可预测
新闻图集
研究揭示:精神疾病之间可能存在基因共性
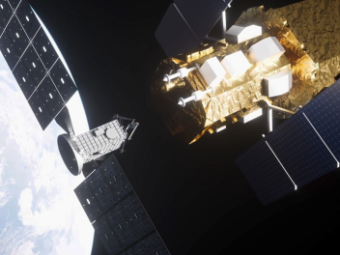
要坠落?NASA机器人紧急上天救援
轻夸克希格斯相互作用研究取得新进展
科报深度
更多>>
·
把化学反应“关”进纳米笼子
·
打破小麦育种高产优质抗病协同的“不可能三角”
·
6年零发表,这位北大博后一出手就是“王炸”
·
“海漂”37年,开科考船的老船长,经历了啥?
·
破除“唯论文”并非否定论文价值
·
最会“吵架”的学生,成了就业市场的“香饽饽”...
国 际
更多>>
·
12人将被困北极冰层8个月,只为科学探索
·
美企发射“星落”返回舱,演示再入返回技术
·
《自然》将“注册报告”论文形式扩展至覆盖全部...
·
模块化设计的纳米递药机器人能自行组装
·
新型深脑刺激系统改善帕金森患者步态
·
免疫“种子细胞”在癌症模型中取得良好效果
高 校
更多>>
·
山东大学校长:不求一蹴而就之功 常守滴水穿石...
·
李斌任南京大学副校长
·
最“活人感”的校长:拒绝成为自己讨厌的那种人
·
徐全忠任内蒙古财经大学校长
·
上财校长:避免活成一个“精于计算却丧失温度”...
·
科研人员揭示锂硫电池微观反应“黑箱”
科 普
更多>>
·
顾方舟:选择活疫苗背后的“三笔账”
·
肽注射热潮背后暗藏隐忧
·
听南极考察队员讲述科考难忘瞬间
·
追忆“糖丸爷爷”:以身试药彰显一代科学家的使...
·
“本源悟空”完成超100万个全球量子计算任务
·
《科学》(20260611出版)一周论文导读
生命科学
6年零发表,这位北大博后一出手就是“...
全细胞生物传感器阵列斩获日内瓦发明...
我国濒危物种与生物多样性保护领域开...
深海里的“绝食冠军”来啦——吃一顿...
医学科学
新型深脑刺激系统改善帕金森患者步态
免疫“种子细胞”在癌症模型中取得良...
理性看待“逆转衰老”热潮
研究揭示:精神疾病之间可能存在基因...
化学科学
科研人员揭示锂硫电池微观反应“黑箱...
研究揭示钴基析氧催化剂活性位动态生...
我国科学家揭示钾助剂的活性氢新机制
科学家在高透明聚酰胺弹性体研究方面...
工程材料
直播回放丨解锁发光材料的“变色密码...
中欧“微笑”卫星进入科学观测轨道 ...
钟训正:他设计了“国民网红建筑”
新型三维光纤微镊面世
科报快讯
更多>>
·
富锂正极材料领域再获新进展
·
我国自主研制智能衍射分析工具MatDiffract正式上...
·
科学家揭示亨廷顿舞蹈症表观遗传致病新机制
·
研究发现桃金娘细胞壁重塑增强铝耐受的调控新机...
·
中国4个气象站入选世界气象组织百年气象站
·
中国材料大会2026将于7月在武汉举办
动态
更多>>
·
科研人员提出湿地有机碳来源全体系溯源方法
·
研究揭示锂硫电池中高浓度多硫化锂界面层的形成...
·
国产存储系统,斩获IO500双料冠军
·
60名美国大学生走进广外,共启中美青年人文交流
·
这支学生创业团队用立体书撬动文创新赛道
·
椎管内长肿瘤,不用再“大动干戈”
院 所
更多>>
·
孙燕辉:老船长的深海征途
·
江门中微子实验发现中微子质量顺序倾向于正序的...
·
全细胞生物传感器阵列斩获日内瓦发明金奖
·
基金委交叉科学部召开青年科学基金项目评审会
·
我国濒危物种与生物多样性保护领域开拓者汪松逝...
·
陆雅翔:在“钠”场马拉松里,不设限
观 点
更多>>
·
复旦张军:不要押注在“上岸”,要敢闯荡不一样...
·
已然破“四唯”,且看如何立新标
·
智谱等中国大模型何时达到Fable级别水平?
·
徐宗本:数学是创新的源头活水和关键生产力
·
专访丘成桐:基础研究要给从0到1留有空间
·
姚檀栋:以加强基础研究打牢科技强国建设根基
信息科学
模块化设计的纳米递药机器人能自行组...
光镊有了永不疲倦的机器人操作员
AI时代,统一智能平台将是大学运行的...
来自深海的“海人”答卷
地球科学
刚领完国际气象组织奖,他就把奖金全...
12人将被困北极冰层8个月,只为科学...
破译树木年轮里的气候密码
她无氧登顶14座8000米级雪山,采集样...
数理科学
江门中微子实验发现中微子质量顺序倾...
陆雅翔:在“钠”场马拉松里,不设限
里程碑式发现!五种宇宙元素身世之谜...
仿脑光敏器件拥有可编程“遗忘机制”
管理综合
RNA修饰m6A调控绣球菌菌丝生长的表观...
直播预告丨交叉学科遍地开花,选专业...
直播预告丨脑机接口、储能……风口专...
直播回放丨高校专业大洗牌!报考策略...
每日全部新闻
一周新闻排行
1
中国博士后科学基金第79批面上资助...
2
武汉大学领导班子调整
3
学术期刊“提质”,这项提升必选!
4
新一代人工智能国家科技重大专项项...
5
王树国:“学会数理化,走遍天下都...
6
电动飞机要起飞,先得算清这笔“能...
7
他们用10年破解作物“午睡” 百年谜...
8
外星信息可能已抵达地球,而我们却...
9
徐宗本:数学是创新的源头活水和关...
10
轻夸克希格斯相互作用研究取得新进...
新闻专题
更多>>
2026北京科学传播大赛 科学演讲赛道
2026北京市最美科技工作者
中国科学院杰出科技成就奖
2026两会科教观察
《中国科学报》
电子版
2026-6-24
1
2
3
4
科学网电子杂志
每周免费
友情链接
中国科学院大学
|
中国人教育网
美国LetPub专业编辑
中国医院科技影响力排行
意得辑
查尔斯沃思
AJE作者服务