湖南大学王耀南教授团队在中国工程院院刊Engineering发表“Current Status, Challenges, and Prospects for New Types of Aerial Robots” 的综述论文。文章系统梳理了面向未来的新型空中机器人(NTARs)的关键特征、前沿技术、系统应用与未来趋势,聚焦仿生机构、环境适应性、以及跨领域操作等前沿热点,为空中机器人技术的跨越发展和多场景深度应用指明了新路径。
空中机器人的演进:“变形——仿生——多能力融合”
空中机器人的起源最早可追溯至军事领域,随着科技进步与多行业需求爆发,空中机器人已被广泛应用于科学考察、民用巡检、灾害评估、物流运输等场景。与传统固定结构无人机相比,新型空中机器人正向多能力、多形态、智能化演进,成为当代智能装备技术的新高地。
本研究将满足以下四大特征的机器人定义为新型空中机器人(NTARs):①可变形性:具备结构重构与机体变形能力,适应多场景任务;②仿生性:借鉴自然界动物(如鸟类、蝙蝠、昆虫)的运动原理和结构设计优化;③多模态运动能力:可在空中与地面、水面等多介质间切换形态与运动方式;④可装载操作装置:支持爪臂、夹具等执行单元,强化环境交互与作业拓展。
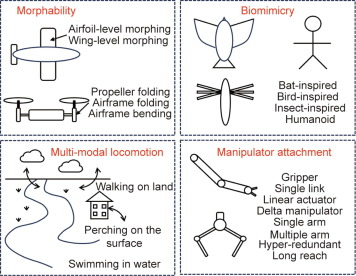
图1. 新型空中机器人(NTARs)的定义
这些机器人已在顶级学术团队(如哈佛大学微型机器人实验室、帝国理工Aerial Robotics Lab、浙江大学现场自主系统实验室等)的推动下实现跨越式创新。例如:仿生翅膀微型飞行器(吸取蝙蝠、鸟类、昆虫等机制)、可“挂靠(perch)”附着于复杂表面、拥有两栖行走/游泳能力的机器人,乃至可空中抓取或操作的多臂系统。
关键技术:材料、驱动、感知与控制系统
论文系统梳理并对比了NTARs的核心技术脉络,论述了新型空中机器人的飞跃发展依赖于多学科前沿技术的持续融合与创新。
首先,在材料与制造工艺方面,轻质高强度复合材料、柔性合金和智能材料的应用,使得空中机器人不仅更加轻盈耐用,还具备了结构变形与自适应环境的能力。高精度3D打印与先进装配技术则提升了微型复杂结构的实现效率,为微型扑翼、可变形机体等新颖形态的机器人成型提供支撑。
其次,现代驱动技术不断进步——如高性能伺服电机、柔性致动器、气动肌肉等,使空中机器人能完成扑翼、折叠、展翅等高度仿生的复杂运动,模拟自然生物多样、灵巧的运动模式。
最后,集成化感知与控制系统的发展成为NTARs智能化的关键。多模态传感器(视觉、超声、雷达等)结合实时数据融合算法,为机器人赋予对环境的精准感知能力;而自主导航、稳定控制与动态避障算法的进化,使机器人能够在风场扰动、障碍密集等复杂环境中保持姿态稳定、高效作业。以上各方面协同进步推动着新型空中机器人的不断演进,让其在现实应用中具备更强的适应性、灵活性与智能决策能力。
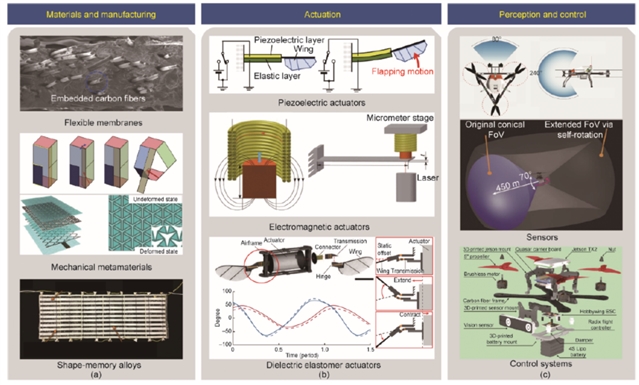
图2. NTAR的关键技术
为什么“NTAR”比“传统无人机”更代表未来?
未来自主系统应用的核心,在于对复杂、动态和非结构化环境的征服。传统无人机主要解决“如何到达并看见”的问题,而NTAR则致力于解决“如何适应并改变”的挑战。研究界通过一系列令人瞩目的系统验证了这一理念的可行性:
扑翼微型飞行器(FWMAV):以仿蝙蝠、鸟类、昆虫为代表,扑翼机器人具备更复杂的翼面变形与动力操控能力。论文汇总了自驱扑翼微型机器人、仿软体关节、主动弯曲翼等最新成果,揭示其在微型飞行、受限空间侦察、环境穿越方面的独特优势。
栖息空中机器人:借鉴鸟类、昆虫的栖息机制,通过微型棘刺、干/湿黏合剂、静电吸附、仿鸟爪夹持器等方式,使机器人能够附着在墙壁、树枝、管道等多种表面,实现“飞行-停留-再起飞”的作业循环,极大节约能源。
两栖机器人:具备空地、空水等多环境穿越能力。代表如能翼展调整的无人机、可投递后变为攀爬或水面滑行机器人的混合结构机型。这些机器人面向灾害救援、生态巡检、水陆联合数据采集任务大幅拓展了传统空中机器人的应用边界。
空中作业机器人:以机械臂、多自由度夹爪、线性执行器等为代表的空中机器人,融合抓取、远程操控等能力。广泛应用于高空维护、桥隧检测、危险区域样本采集、物流装卸等高附加值场景。论文总结了代表性机器人在工业制造、3D打印等领域的前沿进展。
从实验室到广阔天地:NTAR的挑战与未来发展趋势
尽管新型空中机器人展现出多场景与多能力的广阔应用前景,但在实际工程落地和产业化过程中,仍面临多重核心挑战。首先,能源供给与续航能力亟需突破,微型化和多功能集成导致能耗压力持续增大,现有电池和动力系统难以同时兼顾高性能与长续航。其次,材料学的进一步创新至关重要,既要保证机体和运动部件轻质高强,又要满足变形、柔性和耐久性的多重要求。智能感知与控制同样是关键难题,高动态环境下的精确感知、路径规划以及复杂环境鲁棒性对算法和系统集成提出了极高挑战。此外,新型空中机器人还需应对恶劣天气、结构复杂的挂靠与起降场景、高动态下的实时操控等实际工况,当前硬件与软件平台在这些领域的适应性和协同性仍有较大提升空间。能源、材料、智能算法及系统集成等多方面的共性难题亟待多学科协同攻关,以支撑新型空中机器人在更复杂环境下的自主作业与可靠应用。
论文指出,NTARs未来发展将呈现以下三大趋势:一是尺寸与续航能力突破:微型化、高比能续航、新能源系统将促使机器人更灵活、更持久地服务于边远复杂场景;而是机电一体化与多功能融合:集成智能材料、混合动力与复杂操作系统的高集成度平台,将适配更多新型应用需求;三是复杂任务与环境适应:面向灾害救援、无人工厂、极地科考等“极限工况”,机器人须具备自主学习、智能协作和多场景任务自适应调度能力。
结论与展望
文章综述总结了新型空中机器人领域内材料、驱动、感知与控制等关键基础技术的最新研究动态,归纳了扑翼飞行、挂靠作业、多模态移动与空中操作等应用方向下的系统方案,并全面梳理了未来多学科融合驱动下的演进路标。论文特别指出,若干核心共性难题的攻克,将极大推动NTARs在军事、工业、民生、科研等多重应用领域的深度落地。(来源:EngineeringJournals微信公众号)
相关论文信息:https://www.sciencedirect.com/science/article/pii/S2095809924002777
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。