连续体机器人受蛇、象鼻和章鱼触手等自然界的生物启发,具有高自由度、大长径比和强环境适应能力,能灵活进入复杂狭窄环境,在航空发动机叶片打磨、燃烧室维护、核工业管道检测及医疗微创手术领域有广泛应用。但其高性能关节设计、高效精确力学建模和高精度运动控制等仍面临较大挑战。
近日,西安交通大学机械工程学院杨来浩副研究员在Frontiers of Mechanical Engineering(2026年已更名为ENGINEERING Mechanical Engineering)期刊发表一篇题为“Novel claw-type continuum robots: design, modeling, and control”的研究论文,针对肌腱驱动连续体机器人在高性能关节设计、高效高精度力学建模以及高精度运动控制方面的挑战展开研究。
研究亮点
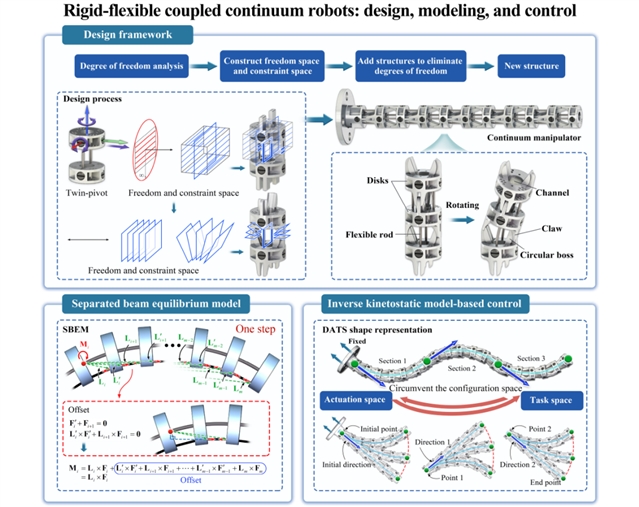
1.提出了刚柔耦合连续体机器人的通用创新设计框架,通过分析结构自由度,建立自由空间与约束空间映射关系来设计结构。以爪式连续体机器人为例,设计过程中,先分析双枢轴柔顺机构自由度,通过添加约束结构,逐步消除扭转和旋转运动,保留平移运动,最终形成由柔性杆和刚爪与圆形凸台相互作用构成的刚柔耦合机构。该机器人工作时,刚柔结构配合约束圆盘运动轨迹,提高建模精度,增强抗扭和抗屈曲性能,中央通道和侧边凹槽还有利于工具安装和减少摩擦。
2.提出了节点力解耦模型,基于此建立了连续体机器人的运动静力学模型,通过单独求解每个单元平衡方程抵消后续电缆张力影响,简化计算并提高计算效率。该模型基于运动学基础,采用齐次变换构建运动学模型,推导变换矩阵和肌腱长度变化方程。该模型与传统链式梁约束模型不同,无需从末端关节递归计算力和力矩,直接单独计算各关节力矩,大幅减少计算量。还考虑摩擦、重力、外部载荷等因素,建立柔性杆弹性平衡方程,当计算关节角超过最大限制时按刚性结构处理。
3.提出了连续体机器人的逆运动静力学建模及其控制方法,其核心是利用正向运动静力学模型迭代逼近目标状态。提出直接驱动任务空间(DATS)形状表示法,仅用各段节点位置和初始点方向描述机器人形状,规避配置空间和关节角确定难题。迭代求解逆运动静力学过程中,先确定机器人形状,用正向模型迭代逼近各段目标点,调整肌腱张力。对于多段机器人,按顺序迭代,虽计算量随段数增加,但能防止段间过度影响。仿真结果验证了该方法在逆运动静力学中的可行性和计算效率。
4.开展了扭转实验、运动静力学模型验证和逆运动静力学控制实验。扭转实验表明爪式结构抗扭刚度约为双枢轴结构305倍,验证其抗扭优越性;运动静力学模型验证实验中,平面内末端位置平均和最大误差分别为1.79%和2.91%,三维空间为2.13%和2.69%,且计算时间较传统模型快20倍以上,验证模型精度和效率;逆运动静力学控制实验中,圆形和“XJTU”轨迹最大误差分别为2.88%和3.70%,验证控制方法可行性。(来源:EngineeringJournals微信公众号)
相关论文信息:https://journal.hep.com.cn/fme/EN/10.1007/s11465-025-0832-8
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。