机器人等智能技术的迅速迭代正推动建筑行业迈向人机协作。顺势地,机器人已突破劳动资料属性,形成劳动者属性,在生产劳动中与人类共同构成人-机二元劳动力。这一新形态的劳动力出现必然会对工程项目的分工格局、组织形态、技术协同、管理模式、协调机制等带来前所未有的变化。然而,现有研究对这一变革及其可能引发的连锁效应仍缺乏系统性认知。因此,本文以社会技术系统框架分析人机协作,考察建筑机器人从“工具”到“伙伴”的技术演进并探讨在此过程中人机协作模式的跃迁规律。同时,基于Leavitt系统模型将人机协作界定为“人-技术-任务-结构”的耦合配置,分析人机协作的技术属性和社会属性带来的工程管理技术逻辑与管理模式重构。最后,本文提出了面向新型人-机协作特征的十个关键议题,以期探讨人机协作在工程管理领域的发展前沿。
引言
建筑业作为典型的传统产业,存在劳动力短缺、生产方式粗放、信息化和工业化水平较低等系统性挑战,陷入“用工荒”、“技能荒”双重困境。随着人工智能(AI)、材料科学与自动化等新兴技术的深化发展,机器人产业快速升级迭代,在重复性高、劳动强度大或环境恶劣的施工任务中展现广阔潜力(Chen and Adel, 2025)。麦肯锡公司(2017)估计建筑业的自动化潜力高达47%。ABB全球调查显示,81%的建筑企业计划在2030年前采用或扩大机器人应用(ABB, 2021)。麦肯锡公司(2023)最新预测,未来五年内机器人与自动化将占据工业领域资本支出的25%。ABB、FANUC、Boston Dynamics等全球领先机器人企业纷纷布局建筑领域,研发出具备测量、砌筑、搬运、喷涂等不同功能的建筑机器人(Parascho, 2023)。建筑机器人逐渐渗透各项施工任务,展现出成为“新质劳动力”形态的潜力。
机器人发展的根本动力是将人类从机械性、程序性劳动中解放出来。各类数字技术的快速融合,机器人开始具备与人类一致的感知、分析、决策、执行等基本同质能力(Kirtay et al., 2023)。《Nature Machine Intelligence》发表的编辑评述《基于大语言模型的机器人规划》(2025)指出,机器人不仅在标准化任务中展现出更高的效率与适应性,也能够在非结构化环境下解析模糊语义、规划长程任务并基于视觉与力觉反馈灵活调整行为。同时,机器人在体力输出、持续作业与专注控制等方面弥补了人类的生理局限,进一步拓宽了其适用场景(Zhang et al., 2023)。机器人已突破劳动资料属性形成劳动者属性,在生产劳动中与人类共同构成人-机二元劳动力。
当机器人作为与人类平等的劳动执行主体时,工程项目的分工格局、组织形态、技术协同、管理模式、协调机制等迎来了前所未有的变化。本研究从技术与社会双重视角出发,系统审视机器人技术嵌入建筑领域并重塑工程管理模式的进程。重点解构机器人技术的能力演进路径及其所塑造的人机互动、社会关系与组织形态,旨在揭示人机协作实现跃迁的内在逻辑,并为工程管理的理论发展与实践创新提供见解。
工程管理中人机协作的“技术—社会”属性
人机协作在工程管理中的应用远非简单的工具替代或功能增强,这一协作关系中的技术要素与社会结构互构且存在复杂性。为深入解析其内在复杂性,本文引入社会技术系统理论作为核心分析框架。该理论被诸多学者用于阐释技术与社会组织的相互作用,它强调任何高效能的系统都源于其技术子系统与社会子系统的协同优化。人机协作的技术子系统涵盖了机器人的感知、决策、执行等硬件与算法能力;而社会子系统则包含了成员间的协作模式、角色分配、信任建立与组织文化。二者相互交织、彼此塑造,共同决定了人机协作系统的最终效能。因此,人机协作是一种兼具深刻技术属性与社会属性的综合体,它的技术属性关注“如何实现”协作,包括能力、交互、效率等问题,构成了协作的基础。社会属性则关注协作“带来什么影响”以及“如何管理这些影响”,关乎工作模式、伦理、信任等话题,决定了协作能否被接受和可持续发展。
2.1 人机协作的技术属性
人机协作的技术属性是指基于现代信息技术的快速迭代,建筑机器人已经具备了与人类似的感知、分析、决策和执行等能力,其能力体系也日趋成熟(Ma et al., 2022)。其中,感知能力依托多模态传感器、点云识别等技术获取环境信息;分析能力通过知识图谱、大语言模型进行语义理解与逻辑推理;决策能力结合强化学习与优化算法,实现路径规划与策略生成;执行能力借助模型预测控制与数字孪生,精准完成任务并实现人机协作。
然而,建筑机器人的能力并非一次性完备,其能力的形成与发展经历了一个渐进演化的过程,如图1所示。根据工业机器人和自主系统中基于阶段的分类(Gasparetto and Scalera, 2019; Melenbrink et al., 2020),最近的研究采用建筑机器人能力成熟度评估的研究确定了五个具有代表性的发展阶段(Yao et al., 2025)。
(1)初始阶段:机器人处于纯机械或被动执行状态,智能性尚未显现,仅能完成重复性、规则化的任务,其作用基本等同于传统工具。
(2)起步阶段:机器人具备初步感知或简单执行能力,如路径识别与装配操作,但协作性弱,难以适应复杂施工任务与多任务协调。
(3)发展阶段:机器人实现感知、执行与基础决策能力的初步联动,可独立完成标准化子任务,成为工人的能力补充。
(4)高级阶段:机器人感知、认知、决策与执行四维能力趋于成熟,可处理非结构化任务,并与工人实现信息与节奏上的协同,成为具有自主判断能力的合作者。
(5)优化阶段:机器人具备场景迁移与自适应学习能力,并嵌入施工组织网络,参与任务调度与局部决策,达到类人化技术的理想形态。
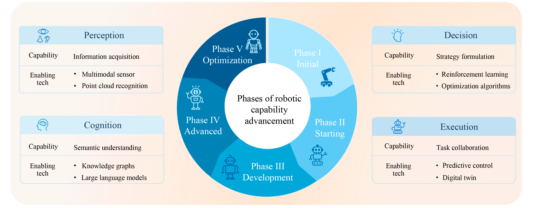
图1.建筑机器人的能力结构与发展阶段
在工程实践中,建筑机器人正展现出愈发“类人化”的能力特征。多模态感知与语义建模使机器人能够在复杂环境中实现类人情境感知(Wang et al., 2022)。运动学优化与增强现实技术则提升了其在受限条件下的操作精度与协作性能(Xiang et al., 2021)。借助算法优化的进步,机器人可以更高效地组织装配顺序与分配资源(Funk et al., 2022)。强化学习与模仿学习的应用使其在缺陷检测等动态任务中具备自适应策略(Zeng et al., 2020)。大语言模型的融合进一步赋予机器人类人推理能力,将语义理解与视觉感知相结合,生成具备情境意识的任务规划(Wang et al., 2025a)。此外,数字孪生技术将机器人嵌入施工工作流中,实现迭代校准、实时协同与更主动的协作执行(Wang et al., 2021)。然而,现有研究大多仍聚焦于机器人的性能提升与任务级优化,对“协作”作为一种系统性能力的关注尚显不足。机器人作为“协作者”而非简单“工具”的角色尚未得到充分探讨。
2.2 人机协作的社会属性
在“技术类人化”的背景下,人机协作属性不仅体现在功能执行,还涉及社会关系互动与组织重构。人机协作的社会属性关注其对个体、组织、社会关系、伦理规范等“软”层面的影响。为补充对人机协作社会属性的刻画,在社会技术系统的总体框架下,有必要引入能够细化人机协作“社会属性”的理论工具。技术人类学理论解释技术如何获得能动性并参与角色配置,而人机社会学则从社会结构层面阐释人机互动中的关系、规范与秩序形成,这两种理论从不同层面对人机关系中的社会互动进行了补充性解释。“技术人类学”由德国学者Hans Sachsse提出,否定技术中性工具的传统认知,将技术视为人类器官的延伸(Wang, 2021)。法国学者Pierre Lemonnier补充强调技术在被使用和传承过程中体现出能动性与社会互动性,主张技术本身具备行动能力和社会属性(Lemonnier, 1986)。Wang et al.(2023)指出人类和机器在功能上的有机互补将促成人机关系从机器“辅助、从属”到人机“合作、平等”的演变,人类和机器成为平等的社会主体。人机社会学进一步强调,人类与机器共同构成一种相互依存的混合社会系统,其集体结果源自双方的互动,而非单方面的作用(Tsvetkova et al., 2024)。这种系统性理解体现为建筑机器人的角色变化——它们正日益作为具备自主决策能力的智能主体嵌入组织环境中。人机协作正从线性的任务协调逐步转向结构性的合作关系,推动协作模式与组织机制的系统性变革。
2.3 人机协作模式
目前,学界对人机协作尚无统一定义,现有研究多从时空关系界定其边界,当人与机器人在同一时间、同一空间中共同完成任务,并在操作或决策上存在直接交互时,可被视为协作(Liu et al., 2025)。本文认为,建筑人机协作是指围绕共同的施工任务目标,工人与建筑机器人在共享或相邻且相互影响的作业空间中同时间内共同完成施工活动的过程。协作的核心不在于机器人是否独立完成特定任务,而在于人和机是否在执行或决策上互为条件,即一方的感知或行为会被另一方感知、解释并用于调整其后续行动。
随着机器人自主性与能力的提升,建筑机器人从辅助工具发展为可独立完成标准作业的主体,进一步具备理解和决策能力与工人协同分工。因此,以机器人自主程度及人机互动深度为主要依据(Liang et al., 2021; Rodrigues et al., 2023),本文归纳了建筑人机协作的五种代表性模式,如图2所示。以纯人工执行模式为基准,建筑人机协作模式呈现从机器辅助到人机执行协同、人机认知协同直至集群机器人的演进路径。
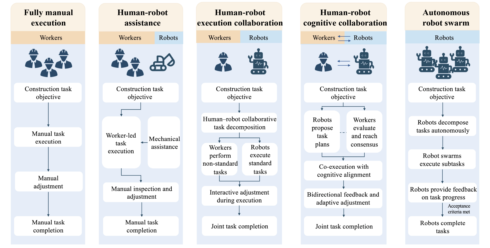
图2.建筑领域人机协作的五种模式
模式0:纯人工执行工人承担任务全流程,完全依赖人类判断与经验。这种模式对复杂或动态环境适应性强,但效率波动大,是最传统的作业形态。
模式1:机器辅助模式机器人作为机械设备嵌入工作流程,由人类主导并提供技术支持。人类主导任务执行,机器人承担重复性或重体力工作,提升局部效率。
模式2:人机执行协作人与机器人共同参与任务分解与执行,强调过程配合。人类完成复杂推理与决策,机器人负责标准化操作,二者实现任务节奏与信息流的同步。
模式3:人机认知协作人机形成信息互通与判断反馈机制,共同参与决策与调整。机器人不仅执行,更主动响应工人操作,体现出更具互动性和平等性的协作关系。
模式4:自主机器人集群机器人自主分解与执行任务,人类仅负责调度、监控与异常管理。多机器人系统实现去中心化协作,人类角色由执行者转向系统监管者。
人机协作重塑工程管理的新特征及新方向
人机协作作为一个复杂的社会技术系统,兼具的技术属性与社会属性并非孤立存在,而是在动态交互中共同演进,驱动着整个工程管理范式的深刻变革。为系统解析这一变革的内在机理,本文采用Leavitt社会技术模型作为分析框架。Leavitt模型由人、任务、技术与结构四个相互依存的要素组成,任一要素的改变都会牵引其他要素发生相应调整,系统变革因此体现为多要素的联动适配(Leavitt, 1965)。
在此基础上,建筑人机协作系统可以理解为具备不同要求与能力的行为者,借助一定的技术与工具,在既定的结构与制度环境中完成明确的任务。机器人技术的持续进步使机器人逐渐纳入以工人为主的施工现场,原本由工人独立完成的任务转为人和机共同完成,并推动结构演变为不同的人机协作模式。本文以这四个要素为核心变量,建立了建筑人机协作社会技术分析框架,通过“技术-人”、“技术-任务”、“结构-人”、“结构-任务”四条作用链揭示人机协作驱动工程管理变革的技术路径与社会路径,如图3所示。3.1和3.2小节基于此框架系统阐述了变量间互动所催生的工程管理新特征,总结出15项变化并展望其未来研究方向。
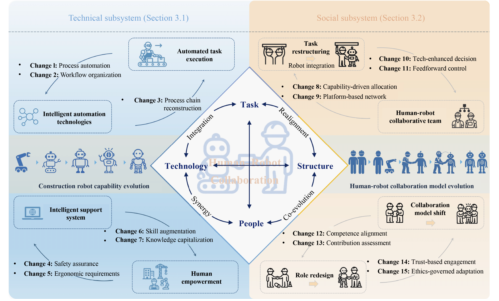
图3.人机协作驱动工程管理系统变革的社会技术框架
3.1 技术子系统驱动的工程管理变革
3.2 社会子系统驱动的工程管理变革
3.3 面向人机协作的工程管理潜在研究方向
基于前文对人机协作技术社会属性与工程管理范式重构的系统分析,本文在此基础上提出十项亟需深入探讨的研究方向。
(1)人-机角色与任务边界定义:在多维任务需求下,如何将机器人能力与工人能力进行量化表征,实现最优的人-机-任务匹配?
(2)人-机比例与协同配置优化:在不同作业情境下,如何基于人机能力差异确定最优协作比例,并实现实时动态重配?
(3)人-机协同的效率问题:在兼顾经济可行性、技术成熟度等因素的前提下,如何识别影响作业效率的关键因素并构建模型以实现效率提升?
(4)人-机协同的安全问题:在任务复杂度、技能需求和场景不确定的条件下,如何建立科学、安全的人-机配置?
(5)效率、弹性与发展统筹问题:考虑到短期效率提升、风险抵御能力和长期技术演进,如何制定机器人技术的阶段性部署和差异化调整策略?
(6)组织变革与绩效问题:在人-机混合团队情况下,如何重组流程与组织结构,设计衡量人、机贡献的绩效评价体系?
(7)责任归属和伦理问题:当人机协作系统出错或造成损害时,如何划定“人-机混合行为”中的法律责任与伦理义务边界?
(8)多跨产业全链条协同生态构建:如何促进机器人技术与建筑全产业链的深度融合,推动形成平台化、模块化的新型产业生态?
(9)领域知识库的建构问题:在项目高度异质性的前提下,如何实现工艺知识的标准化提炼,支撑跨项目智能复用与过程优化?
(10)建筑项目的设计导向型转型:如何通过重新设计现场布局、作业空间配置与项目调度排程,以适应并优化人机协作?
结论与展望
建筑领域的人机协作并非既成现实,而是在技术能力与社会结构的复杂互动中持续演进的动态过程。本文基于社会和技术属性两个视角,将工程管理中的人机协作理解为一个由“人-结构-技术-任务”四个变量构成并相互作用的社会技术系统。其中,技术属性决定了人机协作如何被可靠地实现与稳定运行,而社会属性则关乎人机协作过程如何被有效地治理与制度化扩展。二者的持续耦合表明,人机协作在本质上是一种系统性的共生演化,而非技术与社会的简单拼合。协作的最终绩效取决于任务与技术的匹配度、角色与权责结构的清晰度,以及交互接口的可解释性与可验证性。因此,工程管理的转型不应是对技术变革的被动响应,而必须是主动设计与适配这一新社会技术平衡的战略举措。
未来的研究与实践应超越单一目标,转向技术与社会维度的系统性整合。重点方向包括:构建人-机能力量化与任务匹配的动态度量;设计作业空间布局与调度排程;优化人机比例与协同配置;重构人机混合团队的绩效评价体系;建立数据标准、接口协议等合规框架;完善工人情境化培训,统筹人因、安全与福祉;纳入伦理与责任边界的审计机制等。只有当机器人被视为嵌入作业流程与组织结构的主动参与者,工程管理才能在提升生产效率与安全性的同时,实现人机协同下的组织进化与可持续发展。(来源:EngineeringJournals微信公众号)
相关论文信息:https://journal.hep.com.cn/fem/EN/10.1007/s42524-026-5225-0
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。